מוצרים






SCKR1-6200 מתנע רך מנוע אינטליגנטי מקוון
סקירת מוצר
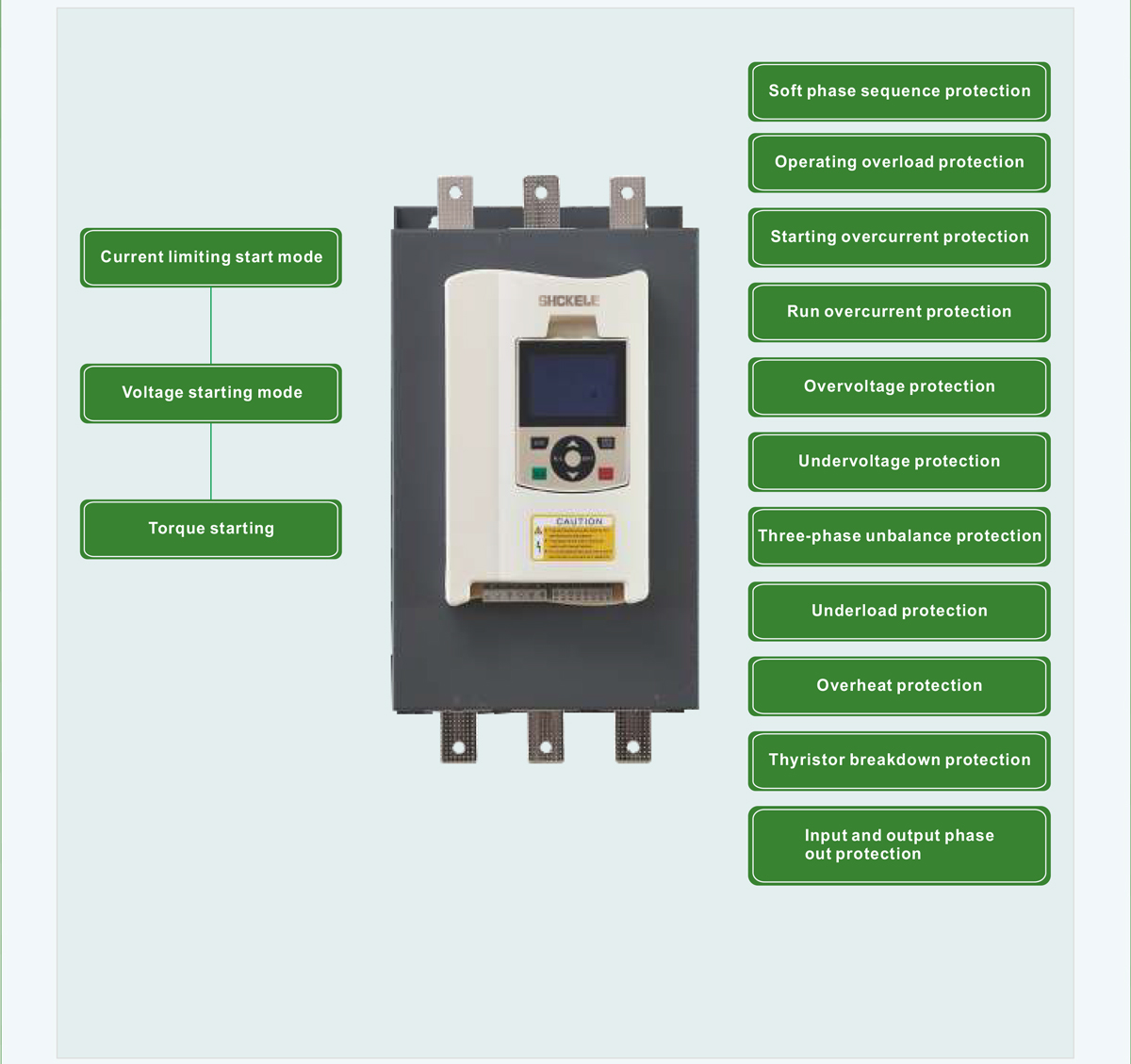
SCKR1-6200 למתנע רכה יש 6 מצבי התנעה, 12 פונקציות הגנה ושני מצבי רכב.
MCU בתור הליבה, בקרה דיגיטלית חכמה, מתאימה לעומסים שונים של התנעת מנוע אסינכרוני של העכבר; יכול להפוך את המנוע בכל תנאי יכול להחליק התחלה, הוא נקבה של מערכת גרור הגנה, להפחית את ההשפעה הנוכחית על רשת החשמל, כדי להבטיח הפעלה עצמית של מנוע אמין: חלק ועצירה, יכול לחסל את מערכת הגרירה של ההשפעה האינרציאלית.
תכונות טכניות של המוצר
מתח הפעלה של לולאה ראשית: AC380V(+10~~- 25%);
זרם הפעלה של לולאה ראשית: 22A ~ 560A;
תדר לולאה ראשית: 50Hz/60Hz (±2%);
זמן עליית התחלה רכה: 2-60 שניות;
זמן עצירה רכה: 0-60 שניות;
גורם מגביל נוכחי: 1.5~5.0Ie;
מתח התחלה: 30%~70%Ue;
מצב קירור: קירור המאוורר;
תקשורת: תקשורת טורית RS485;
זמן הפעלה: ≤20 לשעה
תכונה טכנית
שישה פרמטרי התנעה הם אופציונליים כדי להקל על מתנע רך מנוע אחד להתניע עומסי מנוע שונים;
פונקציית זיכרון תקלות דינמית, קל למצוא את סיבת התקלה;
פונקציות הגנה מוטוריות מקיפות
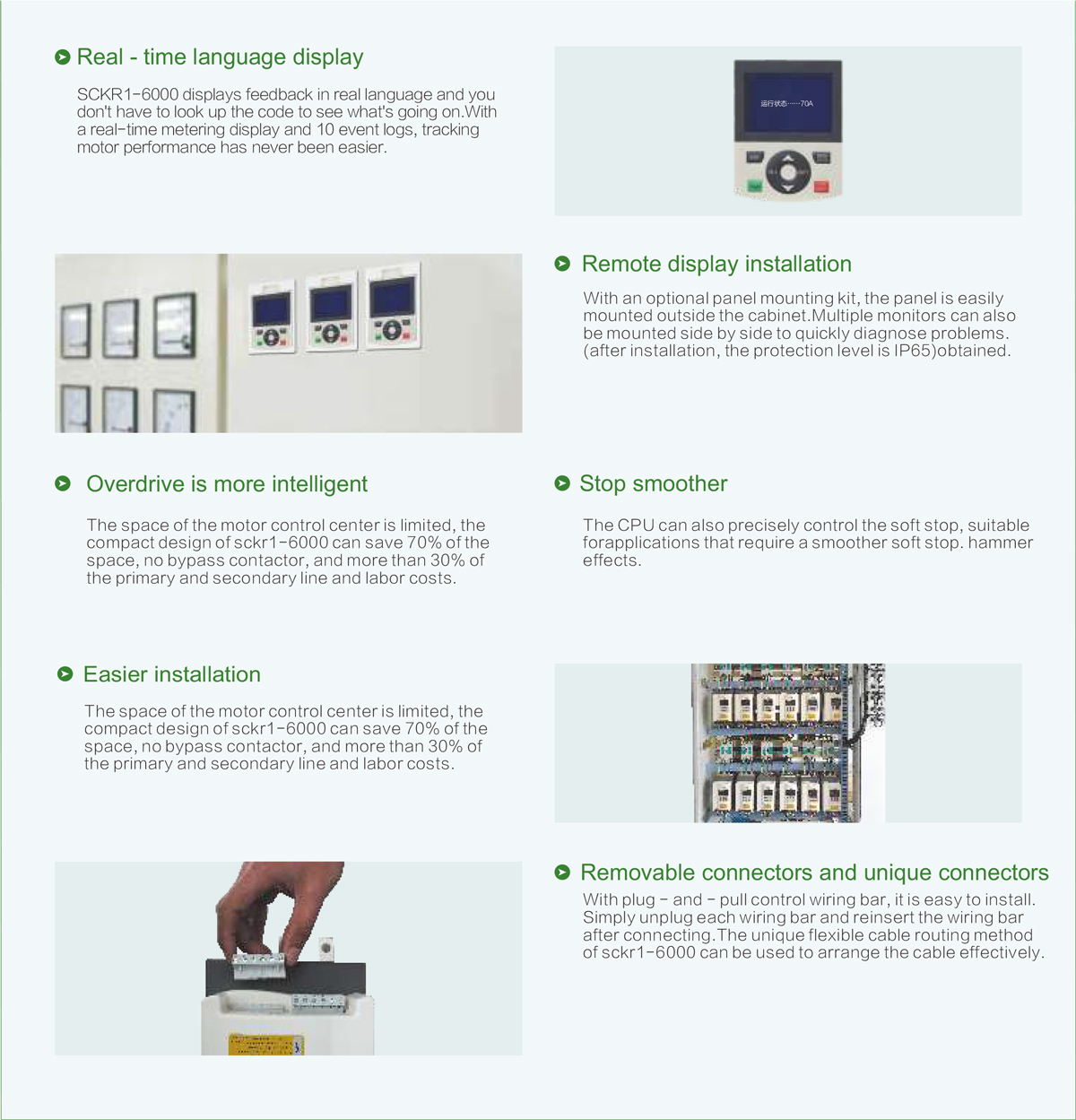
תצוגת LED או LED;
Profibus/Modbus שני פרוטוקולי תקשורת זמינים;
1 עיצוב מבנה קומפקטי, קל להתקנה, קל לשימוש;
התפריט מקובץ לפי פונקציה, וזה קל לתפעול;
מצב פעולת Snap
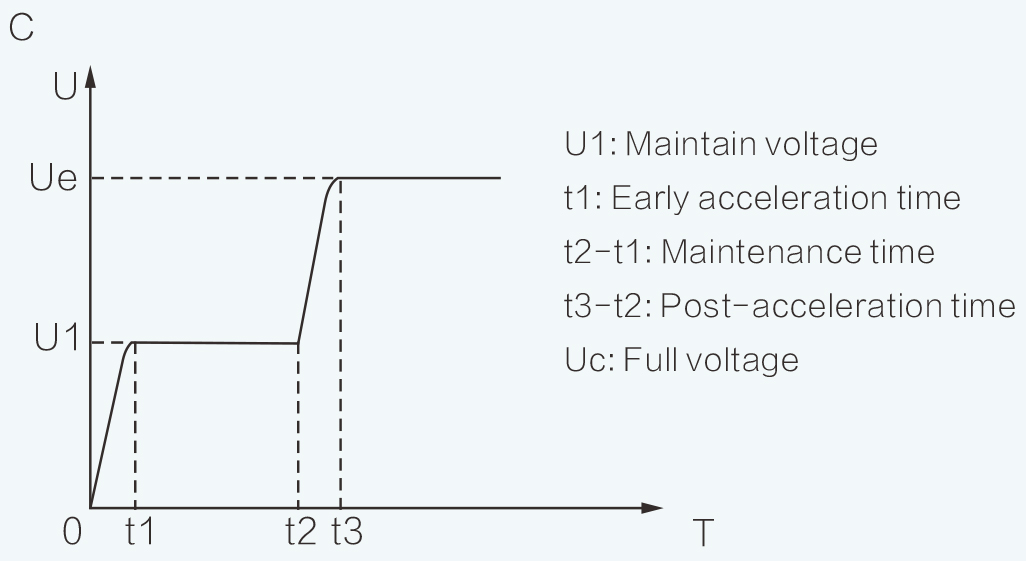
צורת גל פלט של מצב התחלה קפיצה. ניתן לבחור מצב התנעה זה כאשר לא ניתן להפעיל את המנוע תחת עומס כבד כלשהו עקב השפעת כוח החיכוך הסטטי. בעת התנעה, הפעל תחילה מתח קבוע גבוה על המנוע לפרק זמן מוגבל כדי להתגבר על כוח החיכוך הסטטי של עומס המנוע כדי לגרום למנוע להסתובב, ולאחר מכן התחל בדרך של הגבלת זרם (איור 1) או שיפוע מתח (איור 2).


מצב התחלה ורמת הגנה
היכרות עם פונקציית מתנע רכה

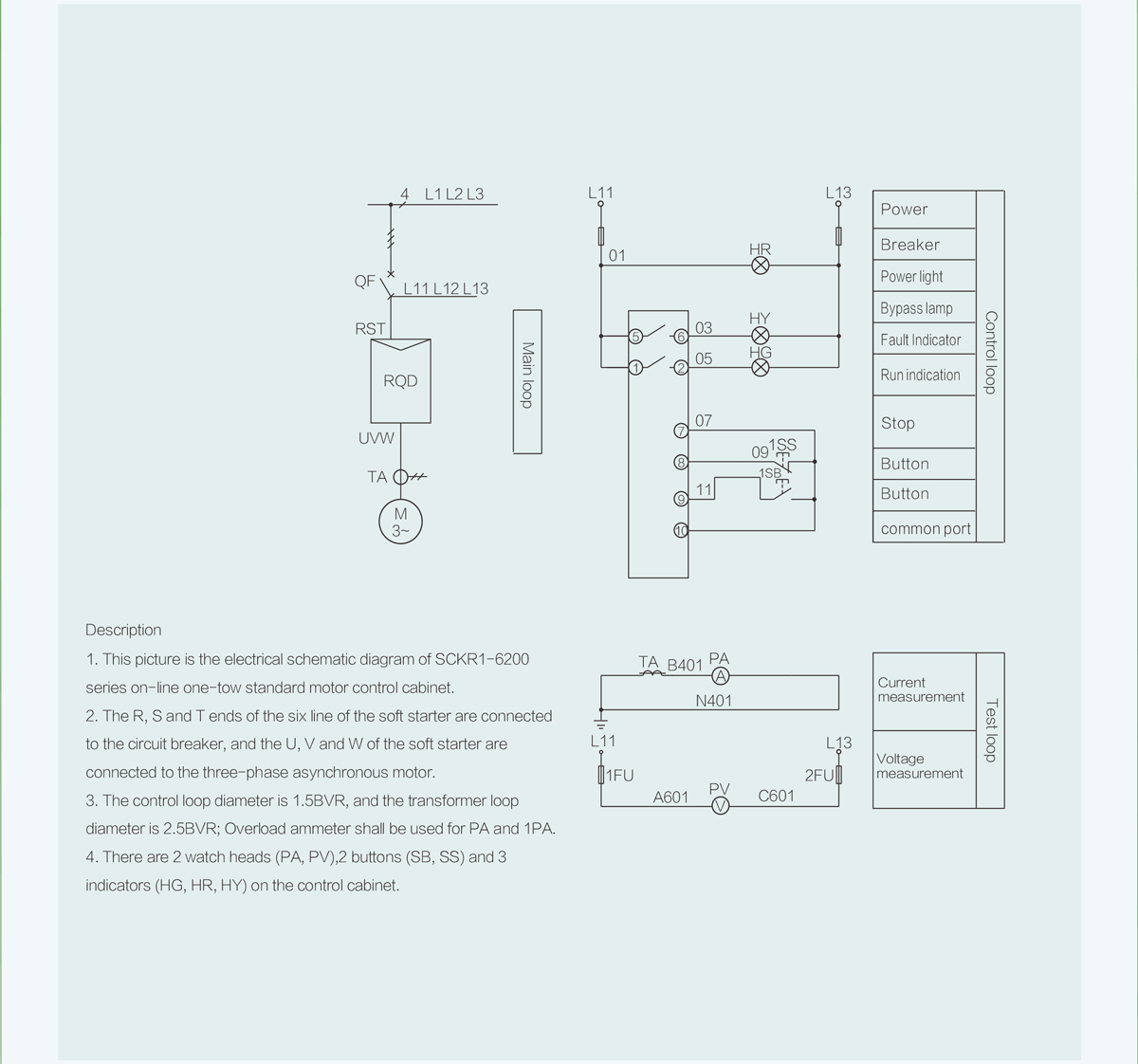
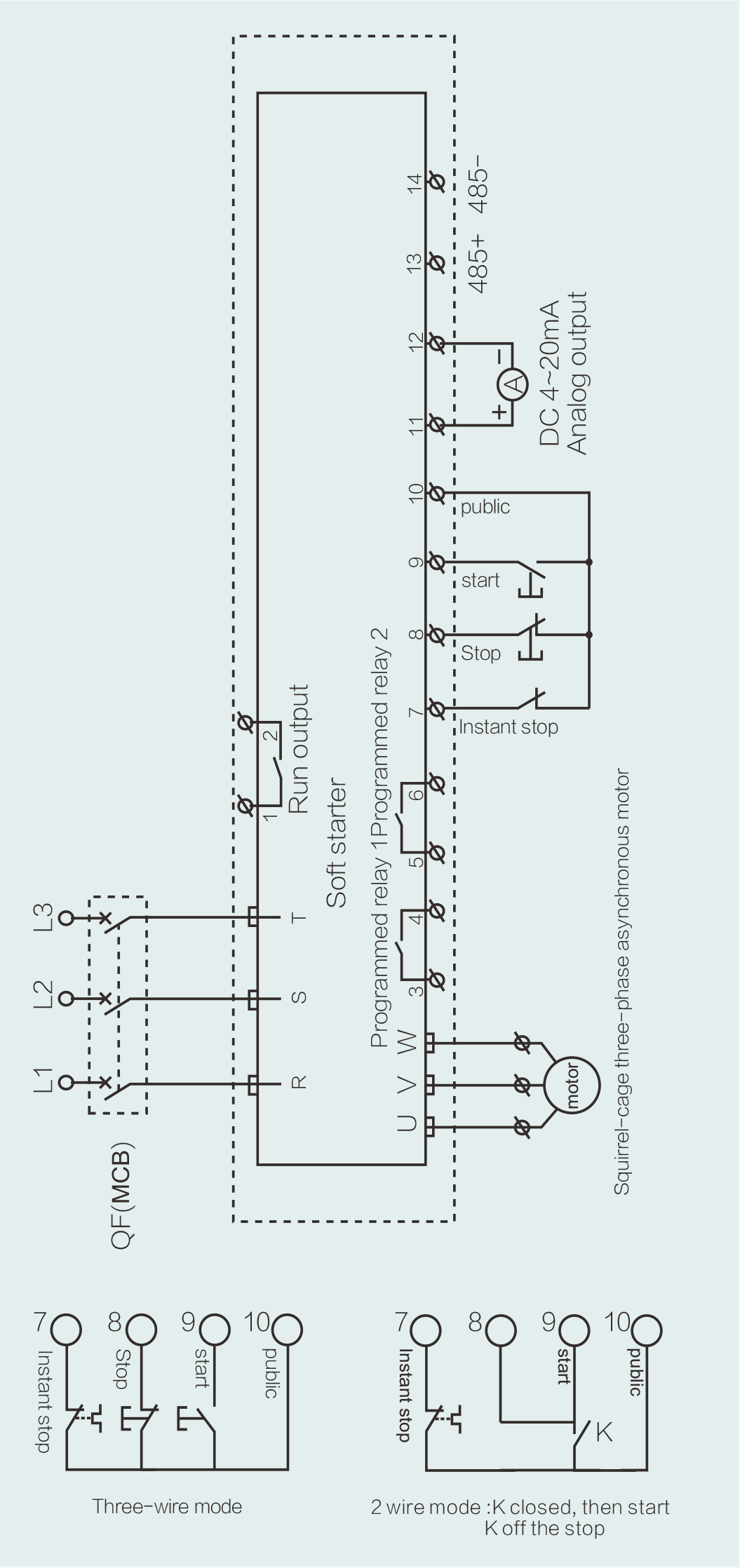
דיאגרמת חיווט חיצונית
מראה מתחיל רך ומידות הרכבה
כְּלָלִי
טווח נוכחי................................11A-1260A (מדורג)
ספק כוח
כניסת רשת (R,S,T)
טרמינלים (1) ו-(2) הם פלט פעולה: משמש לשליטה באינדיקציה (פלט). הם בדרך כלל אנשי קשר פסיביים פתוחים ונסגרים כאשר מתחילים בהצלחה.
קיבולת מגע: AC250V/5A.
טרמינלים 3 ו-4 הם פלט 1 של הממסר הניתן לתכנות: זמן ההשהיה נקבע על ידי פלט 1 הניתן לתכנות של A12, ומצב הפעולה נקבע על ידי הממסר הניתן לתכנות 1ofA11. הוא בדרך כלל מגע פסיבי פתוח, סגור כאשר הפלט יעיל. ערכים אפשריים: 0: אין פעולה 1: פעולת הפעלה 2: פעולת התחלה רכה 3: פעולת עקיפה 4: פעולת עצירה רכה 5: פעולת הפעלה 6: פעולת המתנה 7: פעולת תקלה 8: פעולת הגעה זרם קיבולת המגע היא AC250V/5A.
הטרמינלים ⑤ ו-⑥ הם פלט 2 של הממסר הניתן לתכנות: זמן ההשהיה נקבע ע"י עיכוב פלט 1 לתכנות A14, ומצב הפעולה נקבע ע"י ממסר ניתן לתכנות A13 1. הוא בדרך כלל מגע פסיבי פתוח, סגור כאשר היציאה יעילה.
0: אין פעולה 1: פעולת הפעלה 2: פעולת התחלה רכה 3: פעולת עקיפה 4: פעולת עצירה רכה 5: הפעלה של פעולה 6: פעולת המתנה 7: פעולת תקלה 8: פעולת הגעה הנוכחית קיבולת המגע היא AC250V/0.3A.
טרמינל ⑦ הוא פלט חולף: טרמינל זה חייב להיות קצר במסוף 0 כאשר המתנע הרך פועל כרגיל. כאשר מסוף זה פתוח למסוף 0, ארון ההפעלה הרכה מפסיק לפעול ללא תנאי ונמצא במצב הגנה מפני תקלות. ניתן לשלוט במסוף זה על ידי נקודת הפלט הסגורה בדרך כלל של התקן ההגנה החיצוני.
כאשר FA מוגדר ל-0 (הגנה ראשונית), פונקציית מסוף זו מושבתת.
טרמינלים 8,9 ו-0 הם מסופי קלט עבור לחצני התחלה ועצירה בשליטה חיצונית. שיטת החיווט מוצגת באיור.
טרמינלים (11) ו-(12) עבור פלט אנלוגי של 4~20mA DC: משמש לניטור בזמן אמת של זרם המנוע, מלא 20mA המציין זרם מנוע עבור זרם נקוב נומינלי של מתנע רך 0.5-5 פעמים, ניתן להגדיר על ידי הפרמטר A17.4-20mA זרם הגבול העליון.
ניתן לחבר לתצפית מד זרם DC 4 ~ 20mA.
המסופים (13) ו-(14) הם פלט תקשורת RS485 ומספקים תוכנת מחשב עליון סינית לאיתור באגים ושליטה מרחוק. אין לנתק את קו המסוף החיצוני; אחרת, ארון ההתנעה הרך עלול להינזק.
טמפרטורת הפעלה ................................-10℃-40℃
טמפרטורת אחסון...........................-10℃+40℃
לחות............................5% עד 95% לחות יחסית
| דרג מתח | זרם מדורג | כוח מדורג | לְהַצִיג | פרמטר | לְהַגֵן | מָסוֹף | לְהַעֲמִיס יוֹתֵר מִדַי |
| 220V | 11A-1260A | 3kW-350kW | סִינִית תצוגת LCD | 62 | 12 | 14 | מתכוונן |
| 380V | 11A-1260A | 5.5kW-630kW | |||||
| 660V | 11A-1260A | 5.5kW-1000kW |
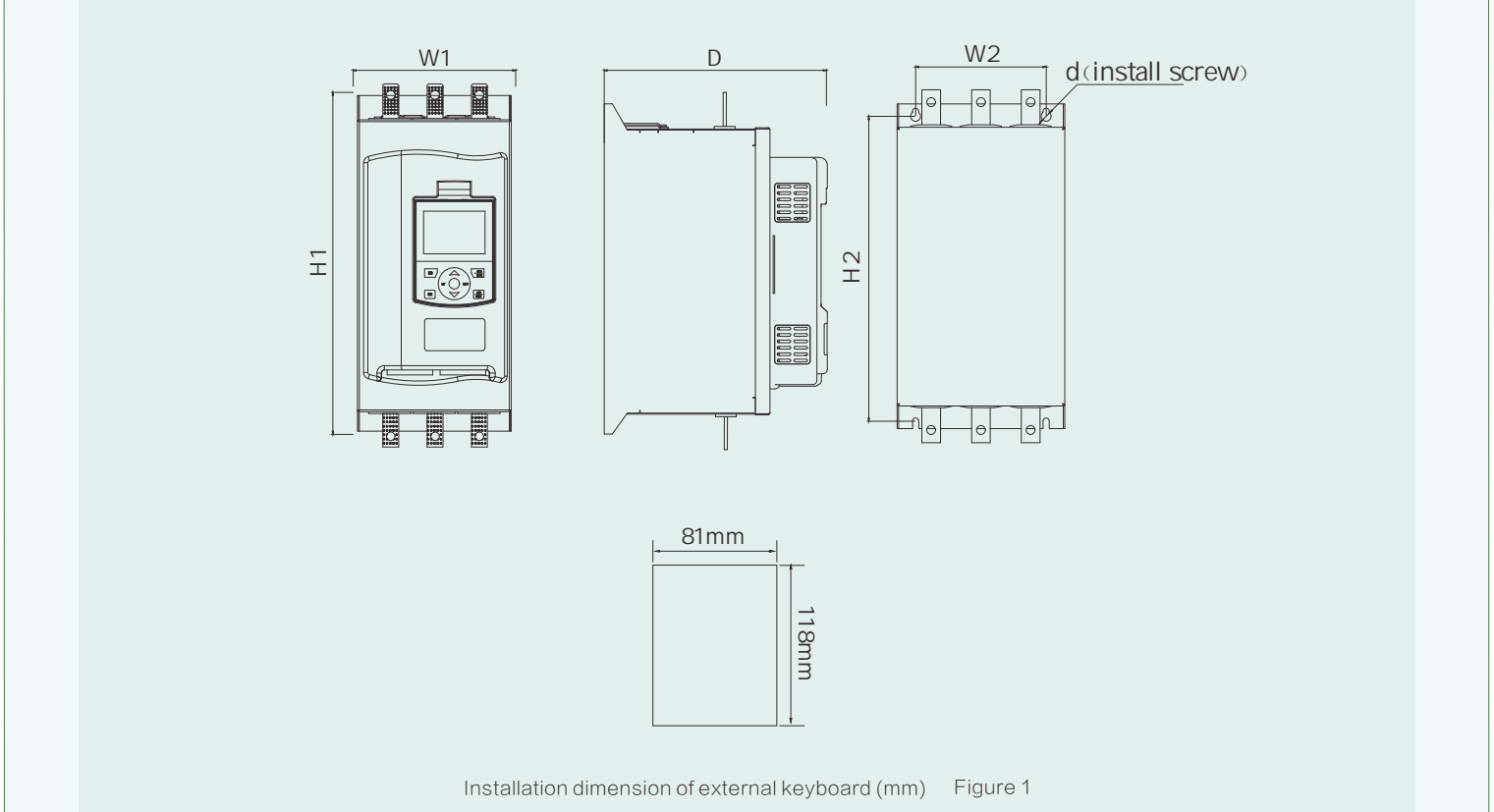
| מפרטים | קו מתאר (מ"מ) | גודל התקנה (מ"מ) | מבט מבחוץ | ||||
| W1 | H1 | D | W2 | H2 | d | ||
| 5.5KW-55KW | 145 | 340 | 214 | 85 | 298 | M6 | איור 1 |
| 75 קילוואט | 172 | 355 | 222 | 140 | 300 | M6 | |
| 90KW-115KW | 210 | 394 | 255 | 150 | 343 | M8 | |
| 132KW-160KW | 330 | 496 | 265 | 260 | 440 | M8 | |
| 185KW-350KW | 490 | 608 | 305 | 335 | 542 | M8 | |
| 400-630KW | 680 | 840 | 418 | 350 | 780 | M10 | |
תרשים חיווט בסיסי של מתנע רך

דיאגרמת חיווט SCKR1-6200